
Why Permanent Magnet Motors are Becoming More and More Popular?
In recent years, the most high-profile motor industry is the permanent magnet motor, and the degree of popularity has shown a growing trend. Why?
The latest achievements in high-energy permanent magnet materials and power electronics technology have greatly promoted the application of permanent magnet motors, robotics, aerospace, power tools, generators, new energy, various types of medical equipment, and electric or hybrid vehicles.
Permanent magnet motors are everywhere and invariably declare such a fact that permanent magnet motors have many advantages over traditional motors such as brushed phase change DC motors, synchronous motors, and induction motors.
(1) Zero copper losses in the rotor, which naturally results in higher efficiency.
(2) High drive torque and output power per unit volume, making compact design solutions possible.
(3) Elimination of slip rings, phase changers, carbon brushes, etc., simplifying motor structure and maintenance.
(4) High air gap flux density compared to conventional motors, resulting in better dynamic performance.
(5) High power factor operation is possible.
(6) A simple six-phase switching voltage source can achieve precise torque, speed, and position control.
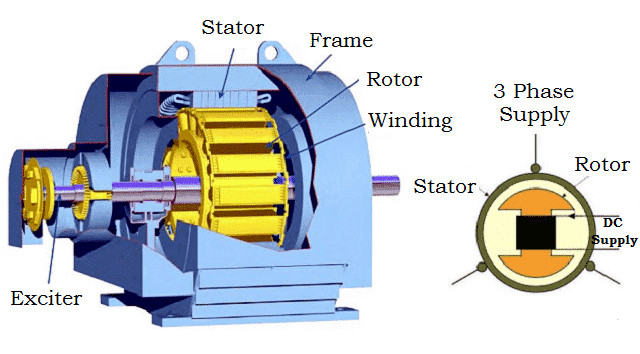
The permanent magnet synchronous motor is mainly composed of various components such as a rotor, end cap, and stator. The stator structure of a PM synchronous motor is very similar to that of an ordinary induction motor. The rotor structure differs from that of an asynchronous motor in that high-quality permanent magnets are placed on the rotor.
The placement of the permanent magnets has a great influence on motor performance. Surface rotor structure – the permanent magnet is located on the outer surface of the rotor core, this rotor structure is simple, but the asynchronous torque generated is very small, only suitable for applications with low starting requirements, and rarely used. Built-in rotor structure – the permanent magnet is located in the core between the squirrel cage guide bar and the rotor shaft, good starting performance, most permanent magnet synchronous motors adopt this structure.
The starting and operation of a permanent magnet synchronous motor are formed by the interaction of the magnetic fields generated by the stator winding, the rotor squirrel cage winding, and the permanent magnets. When the motor is stationary, three symmetrical currents are applied to the stator winding to generate the stator rotating magnetic field, and the stator rotating magnetic field rotates relative to the rotor to generate current in the cage winding to form the rotor rotating magnetic field, and the asynchronous torque generated by the interaction of the stator rotating magnetic field and the rotor rotating magnetic field accelerates the rotor from stationary. In this process, the rotor’s permanent magnetic field and the stator’s rotating magnetic field have different rotational speeds, which generate alternating torque.
When the rotor accelerates to a speed close to the synchronous speed, the rotor permanent magnet field and the stator rotating magnetic field are nearly equal in speed, and the stator rotating magnetic field is slightly faster than the rotor permanent magnet field, and their interaction generates torque to bring the rotor into the synchronous operation.
In the synchronous operation state, the rotor winding no longer produces current. At this time, only the permanent magnet produces a magnetic field on the rotor, which interacts with the stator’s rotating magnetic field to produce driving torque. It can be seen that the permanent magnet synchronous motor is started by the asynchronous torque of the rotor winding. After the start-up is completed, the rotor winding no longer plays a role, and the interaction of the magnetic field generated by the permanent magnet and the stator winding produces the driving torque.
To make a good permanent magnet motor, one key accessory is indispensable: permanent magnet material, neodymium permanent magnet.